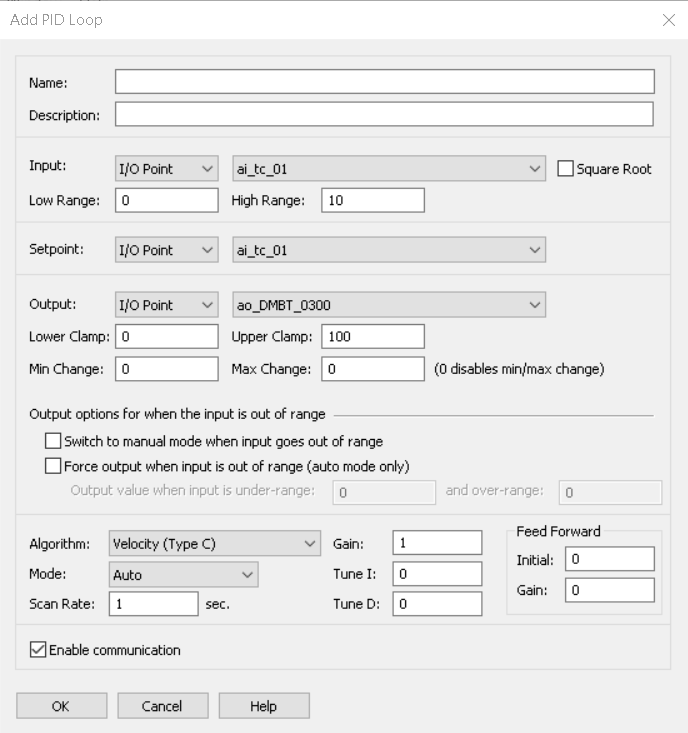
Hi there! I’m currently configuring a PID controller using PAC Control Basic vR10.5a. Is there an option in PAC Control for a direct-acting or indirect-acting PID Controller?
Thank you for answering my question. Much appreciated! Just a follow-up question regarding the PID Output. How do you usually implement some sort of slew rate or ramp-up to avoid a sudden movement of the final control element? For example, if the current valve position is at 10% and I want to set it to 50%. I understand that there is a “Ramp Analog Output” command but I’m interested to know if there is another way to ramp up any variable.