Hi,
I have a PID control that locks and the output signal does not vary according to the input signal. What can be the cause? The version of the PAC project being used is 9.5, thanks
Hi,
I have a PID control that locks and the output signal does not vary according to the input signal. What can be the cause? The version of the PAC project being used is 9.5, thanks
Hi.
Not sure what you mean by ‘locks’, But if you want to put the PID loop in manual and yet have the output change, you need to do that in a chart.
The command you will need to use is ‘Set PID Output’.
If you want the output to track the input, you will need to put a loop in a chart that moves the input to the output when the PID loop is in manual. When the PID Loop is in Auto, do not do that part of the chart or your output will jump around.
Take a look at the PAC Control command guide to get a feel for other PID loop commands that you may want to use.
Hi, Thanks for your quick response.
No, what happens is that in automatic mode the output does not change according to the input. The value of the output is always 100%.
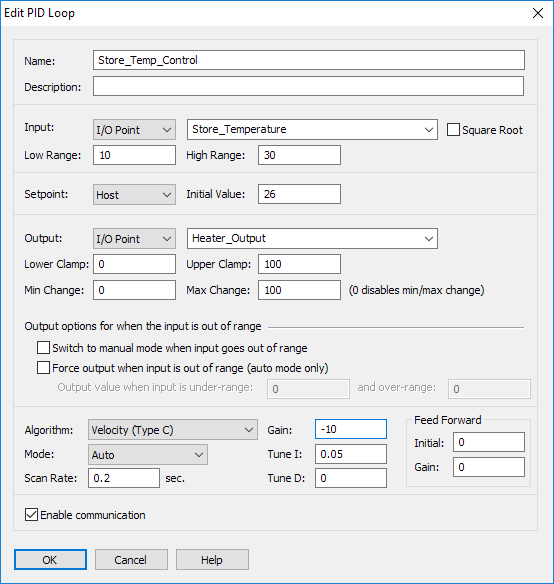
parameters
Input: 0-100
Setpoint: 50
Gain: 2
Tune I: 0.9
Tune D: 0
Ah, right.
Here are a few things to check.
Your gain is positive, and that’s Ok for a cooling loop. The loop here is for heating, so if the input is lower than the set point, I need the output to move in a positive direction, so hence the negative gain.
Double check that you do not have any of the lower or upper clamps set, or the min and max change are not set for something odd. (They can both be zero and thus turned off).
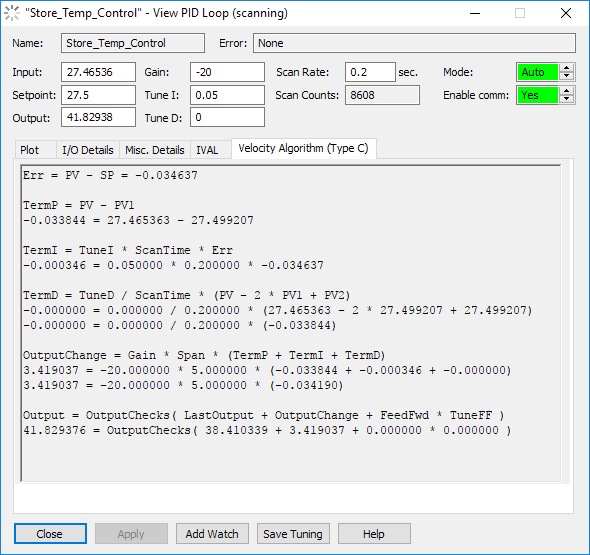
Here are the details of the tab:
What you are seeing here is the PID Loop math. Looking at this, you should be able to start to break down where the loop is failing to move.
If all this fails to show a reason. Email support@opto22 and they will work with you till you get it up and running.
Ok, I will validate the details and comment on how it worked. I really congratulate you on this forum, thank you very much.