…and programming time when controlling digital outputs by using intelligent I/O commands.
Here’s a sample scenario: you need to send a message to your remote location, like: “start filling tank” or “open silo door” and a little later you want to “stop” or “close silo door.” What if, in the meantime, your connection to that remote location gets severed by an unexpected mishap or flaky wireless connection?
Is it time to re-think how your I/O and logic are distributed? For example: replace a brain with a controller at that remote location? Not necessarily.
In the case of Opto 22 I/O units, what we call the brain–the I/O processor–gives you a lot of intelligence right there at the I/O unit. Intelligence such as: PID loops, counters, min/max, degrees F or C conversion, thermocouple linearization, and totalizing.
In this example, you can see how you could leverage the brain’s digital pulse functions to solve the problem:
-
BEFORE shows how your PAC Control strategy would use three commands to open a valve or gate, wait awhile, and then close it.
-
AFTER shows how you can use a pulse command instead to have the brain handle the whole thing locally, so a communication failure won’t leave the valve wide open.
BEFORE:
[INDENT]Turn On [digital output - to open valve/gate]
Delay <Wait for a while. But something could happen like a network going down or a cable getting cut.>
Turn off [digital output]
[/INDENT]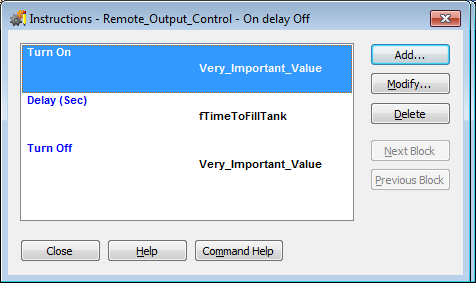
AFTER:
Just send one Start On-Pulse command.
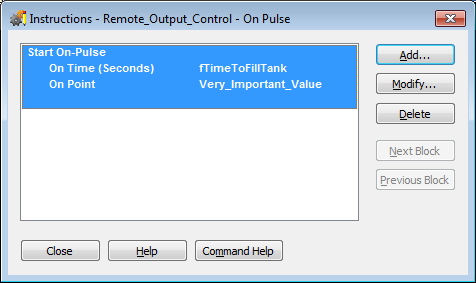
The On-Time is the duration of the pulse (the wait time between the on and the off), and it can be up to almost 5 DAYS! That’s a pretty big tank. Neat-o.
In your PAC Control Command Reference or built-in help, check out the other nifty time-saving and risk-reducing Digital Point Commands–and Analog Point Commands too. Like Generate N Pulses or Get Analog Totalizer Value.
Cheers,
-OptoMary