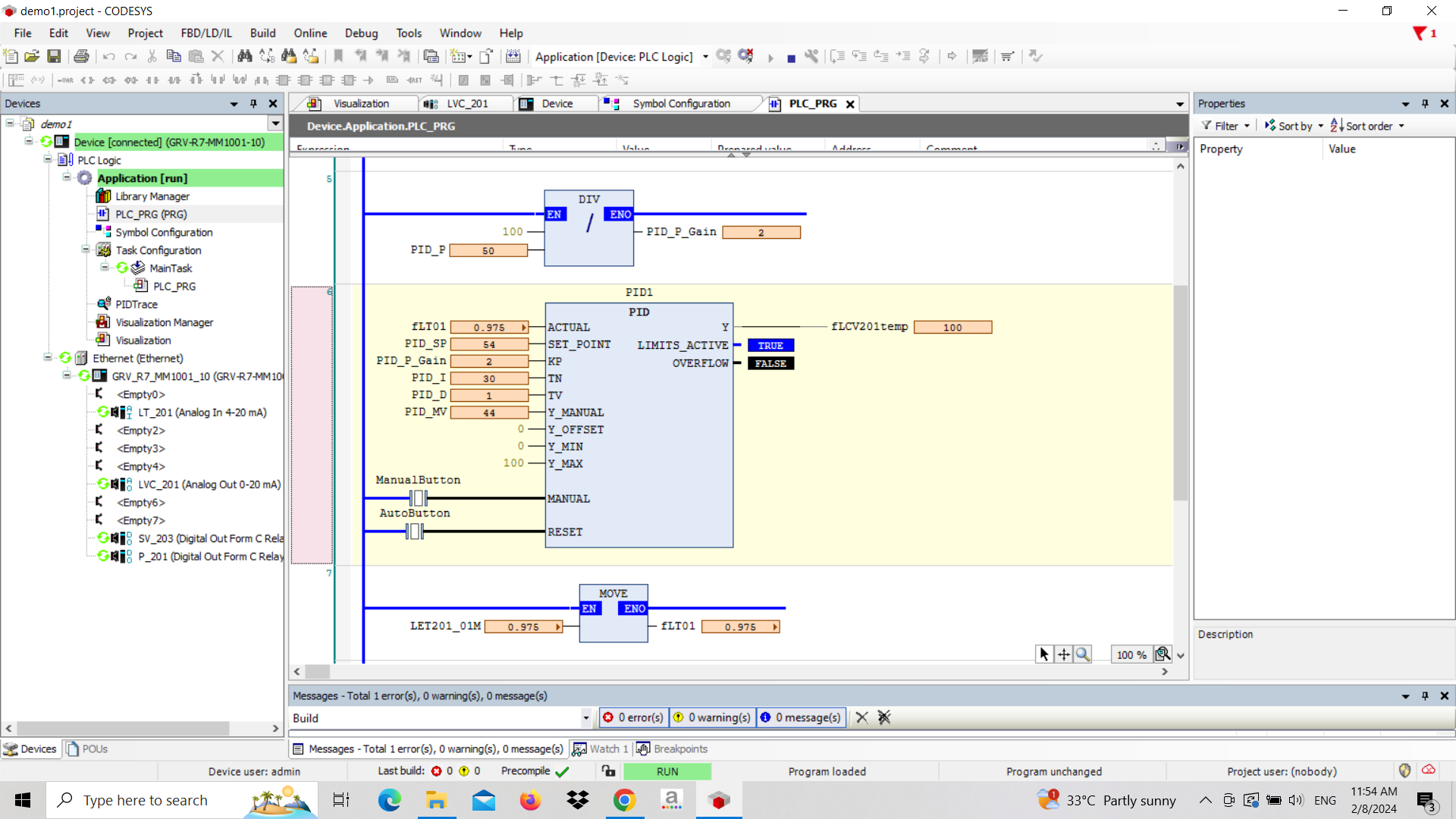
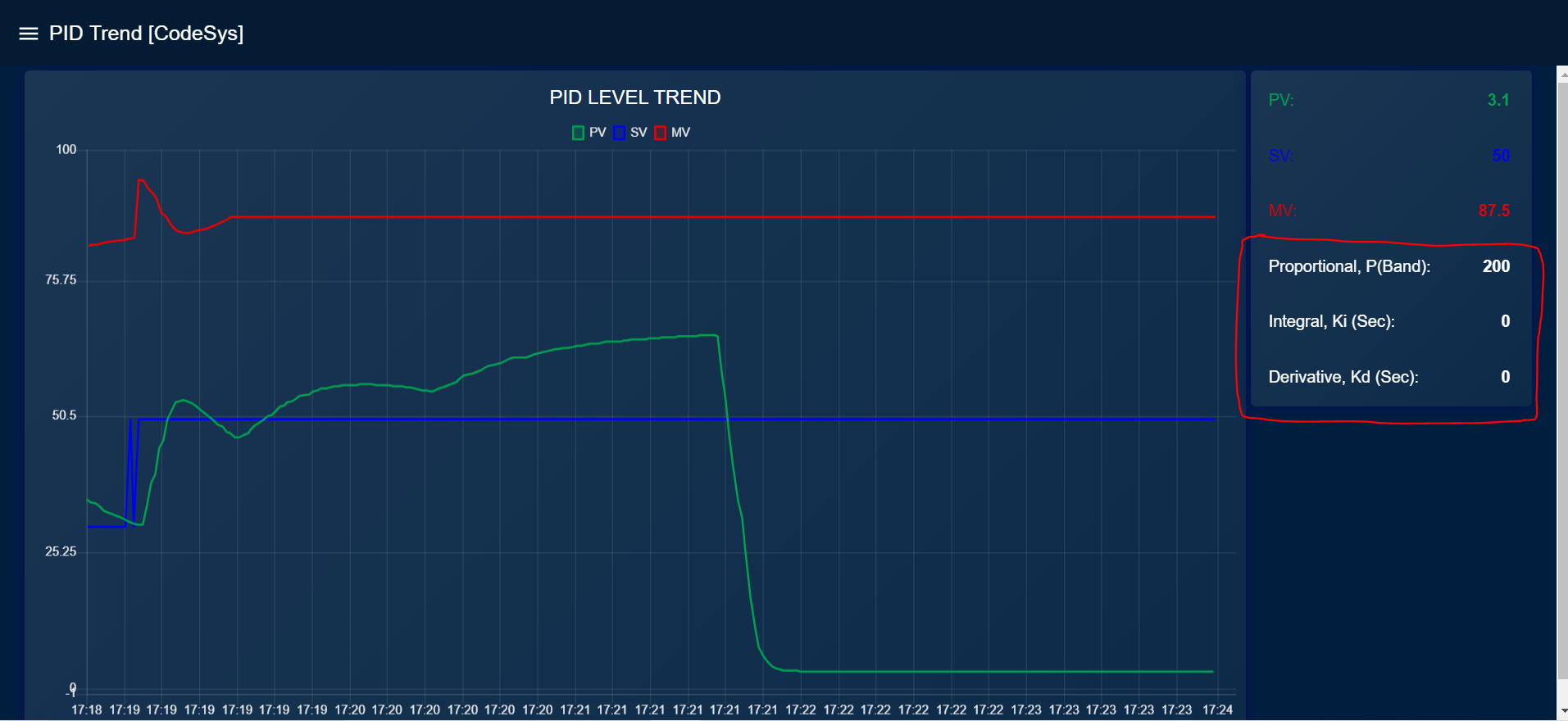
Why after I change the value of Integral, the mv will constant, should be get the reading or wave
it like the mv stuck when the integral is 0
I’m sorry, I don’t fully understand what you are asking here. I would recommend taking a look at some of our PID material, maybe that will help get you going.