Hi all,
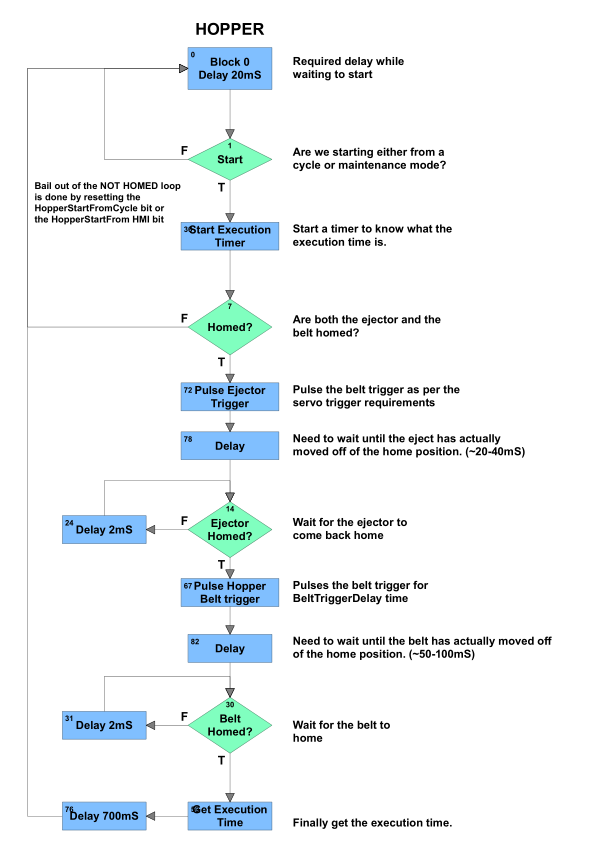
I am working on a chart for a GRV-EPIC-PR1control unit that will activate a pneumatic cylinder,wait for it to complete (come back home), then activate a belt to advance product, then wait for it to return home again. This chart has a few delays sprinkled throughout to make sure, that the devices actually activate and leave home before checking to see that they have come back home. There are also delays used while waiting for them to come back home.
When PAC control is in debug mode with auto step, everything works and is predictable. Without auto step, it seems that none of the delays are being honored. I suspect some of these delays are too short, but I’m not sure how short would be considered too short. If have seen this thread and I’m pretty sure I’m dealing with the same issue, but I’m not exactly sure how it relates to my chart.
Can anyone make suggestions regarding how to modify the following chart to overcome this?
Thanks for looking
Kevin