Hello everyone,
Can I manage an EtherCat network on CodeSys with a groov Epic as PLC ?
Hello everyone,
Can I manage an EtherCat network on CodeSys with a groov Epic as PLC ?
Hi Tommy, welcome to the forums!
At the moment there is no EtherCat EPIC module, so regardless of the CodeSys library, since there is no hardware support, it wont work.
Yah, found this old post, it is pretty sad that Opto has basically abandoned any serious work involving servos.
The only module we have is the CAN module, which is not a bad idea, but then I noticed that Opto still does not have a Pac Control subroutine for it. Not sure I understand why Pac Control is being treated like a maybe option.
When are they going to get at least an EtherNet IP Master subroutine for Epic? As much as I hate A-B, and EtherNet IP, they unfortunately have a lot of followers as slaves.
I have used Profibus in Pac Control, and it sucks, mostly because the Profibus hardware itself is lousy, and RS485 (which it is based on) was never intended to go that fast. Also, RS485 is a three wire electrical design and Profibus eliminates the 3rd wire.
Let’s get an Ethernet field bus say like an EtherCat module, then Opto will finally be a legitimate contender for servo control projects.
This is not because I intend to control the servo moves themselves, that is not the right way to go, however, just communicating to the servos is a major problem because the serious servo companies consider Modbus a joke and therefore they dont support it at all, or it the implementation doesn’t involve any high speed actions at all.
Put simply the CAN module for EPIC had a driver ready to go in Codesys along with some really powerful commands/routines for it.
It was a very quick and clean engineering effort to build the module hardware and firmware being able to build on that Codesys foundation.
I know your a PAC Control guy (as am I), so never say never, but its a lot more complicated getting the driver integrated in that codebase.
Well I mean you get my point, right?
The only option right now to talk to any serious servo manufacturer like Kollmorgen, is to use a pac controller and use the Can module, which as I understand it is really a messy solution.
Why not at least Ethernet IP? I mean they have already implemented Ethernet IP as a slave, so the basics are already there, and no hardware needed, just SW development. Charge for the SW, make it a shell subroutine accessible from Pac Control…
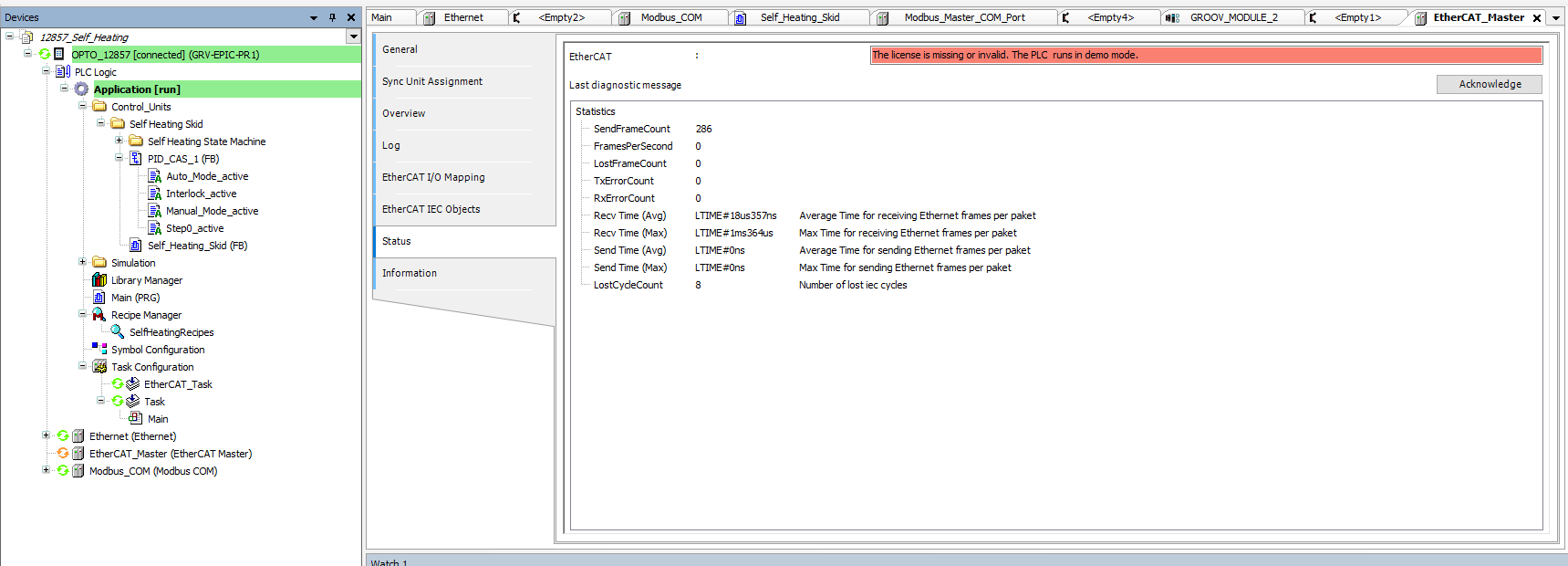
Am I missing something? I thought you can use the secondary network interface as a Ethercat Master. I don’t have any ethercat devices to test it with but I am able to add a master and everything looks like it should work. It is complaining that I need to buy a license so it is running in demo mode.
There is limited support, EtherCAT I/O does work. Nothing else with regard to EtherCAT has been validated on the EPIC.
Ok, well there you go, Codesys can do it, why not Opto?
It seems to me that the Epic is a perfect candidate for EtherCat with a second Ethernet port.
Yes EtherCat would be great option. I don’t even care if I have to pay for it. It’s that important.
For Industry 4.0, motion/server control is very important.
Most PLC and IO manufacturers already offer EtherCat Master modules.
EPIC is a very good control system, but it does not have an EtherCat Master module.
I don’t know why? It seems that OPTO 22 is giving up on the motion control market.
I just came here to say +1, I have a project that will run EtherCAT field bus, and unfortunately I will need to use a different PLC, I will probably still use an EPIC device as a top layer, but it would be nice to make it part of the motion world.